About Me
I'm a Robotics Engineer with a Master's degree from Worcester Polytechnic Institute, specializing in Computer Vision, Deep Learning, and Machine Learning. Currently based in Redmond, WA, I focus on developing innovative vision systems and automation solutions for industrial applications. My expertise spans machine vision integration, object detection, anomaly detection, and robotic systems development.
Work Experience
- Engineered a production dual-camera OCR + depth inspection system for automated Go-Cart routing — deploying optimized YOLO on OnLogic Industrial PCs to locate labels, 3D sensor to verify fill level, and cross-validate top vs. side views in a 2–3s real-time cycle, eliminating manual label verification on the conveyor line.
- Prototyped a dual-branch box damage detection pipeline fusing Photoneo PhoXi 3D surface flatness analysis with VLM RGB visual inspection on an Advantech IPC — achieving a 2s end-to-end inspection cycle.
- Deployed a real-time YOLO + Intel RealSense depth pipeline on OnLogic edge hardware to detect non-conveyable boxes in high-throughput Bulk-Sort flows, enabling automated diversion and eliminating manual inspection.
- Commissioned and deployed scan tunnel and multi-camera sorting vision systems for fulfillment centers and distribution hubs — achieving 99%+ barcode read rates across high-throughput parcel operations using Cognex and Zebra hardware.
- Trained and deployed a TensorRT-optimized instance segmentation model on OnLogic edge hardware for automated bruise detection on chicken wings, enabling real-time defect classification on a food-processing production line.
- Designed and implemented a projector-camera intrinsic/extrinsic calibration pipeline using checkerboard targets, achieving sub-pixel re-projection error for precise spatial alignment in downstream vision-guided operations.
- Integrated MQTT, OPC UA, and TCP/IP communication for real-time data exchange between vision systems, PLCs, and edge industrial PCs.
- Developed synthetic good images using DCGAN's and evaluated the performance of EfficientAD models for anomaly detection by comparing results on original and synthetic dataset.
- Developed a pipeline to generate synthetic images replicating industrial anomalies, such as scratches.
- Led the setup and integration of vision systems for a battery module production lines.
- Developed vision software to automate battery module production, achieving a target of 1000 module per shift.
- Created a web interface for real-time communication between cameras and HMI systems.
- Commissioned and evaluated machine vision systems with 2D and 3D Matrox cameras.
- Refined and translated a C++ pipeline to Python for robotic laser detection, leveraging OpenCV for enhanced image processing capabilities.
- Developed and curated a customized dataset of 500 images for training and validating an object detection model.
- Integrated production-level Object detection models like YOLOv8 to achieve precise center-finding, significantly enhancing the accuracy of robotic placements in subsequent operations.
- Executed various vision tasks such as gauging, barcode reading, OCR, defect detection, part verification, pattern matching, sorting, Flexibowl picking, and 3D inspections.
- Conducted feasibility studies and prototyped, commissioned, and evaluated machine vision systems for 8 companies.
- Created web interface using React framework integrated with ROS to monitor the robots.
- Developed computer vision pipeline for object detection and pose estimation of the robot.
- Research work focuses on an Ensemble Learning Methodology combining multiple existing robotics grasp synthesis algorithms to obtain comparatively better grasp quality.
- Train individual experts like Generative grasping, Residual-Net on Cornell dataset. Compare grasping performance of Ensemble architecture of these experts by evaluating diversity metrics.
- Conduct office hours and lab sessions. Grade assignments for 5 courses (Applied Statistics, Calculus IV, Geometric Concepts, Probability and Discrete Mathematics).
Key Projects
- Developed unified encoder-decoder architecture to perform Depth estimation and Surface Normalization with Semantic Segmentation to boost performance on NYU2D dataset.
- Performed experiments using different weighting techniques (Grid search, Uncertainty weighting). Grid Search offering good trade-off as MIOU increased from 0.751 to 0.806, achieving 7.3% increase.
 View on GitHub
View on GitHub
- Calibrated camera using checkerboard pattern by mapping 3D world coordinates to image coordinates and then estimated parameters of camera through the processes of calculating intrinsic and extrinsic parameters.
- Implemented low-level (Point-Pixel) fusion and mid-level (Box to Box) fusion of LiDAR 3D points with 2D image detections using pretrained YOLOv4 network.
View on GitHub
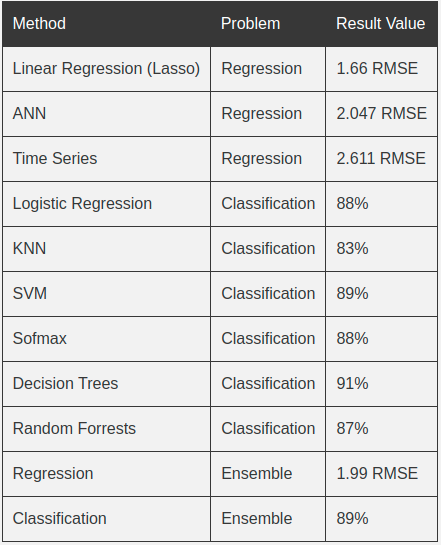
- Built a Time-series regression model with regularization techniques to predict crime rate for succeeding years.
- Implemented multiple classification (SVM, KNN, Decision Tree, SoftMax) and regression models for homicide prediction, used Ensemble learning method on classification methods and obtained an accuracy of 88.92%.
View on GitHub
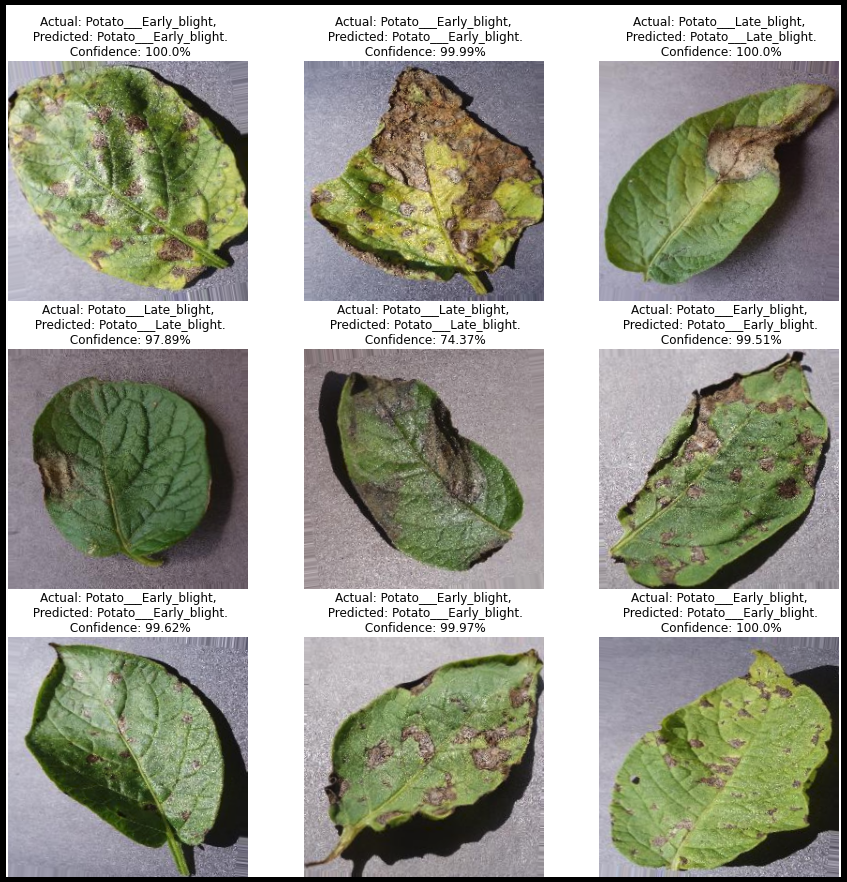
- Created a Sequential model to distinguished plants as healthy or diseased. Resulted in 83% accuracy.
- Developed an IoT (Internet of Things) based smart agriculture system for monitoring soil environment.
View on GitHub
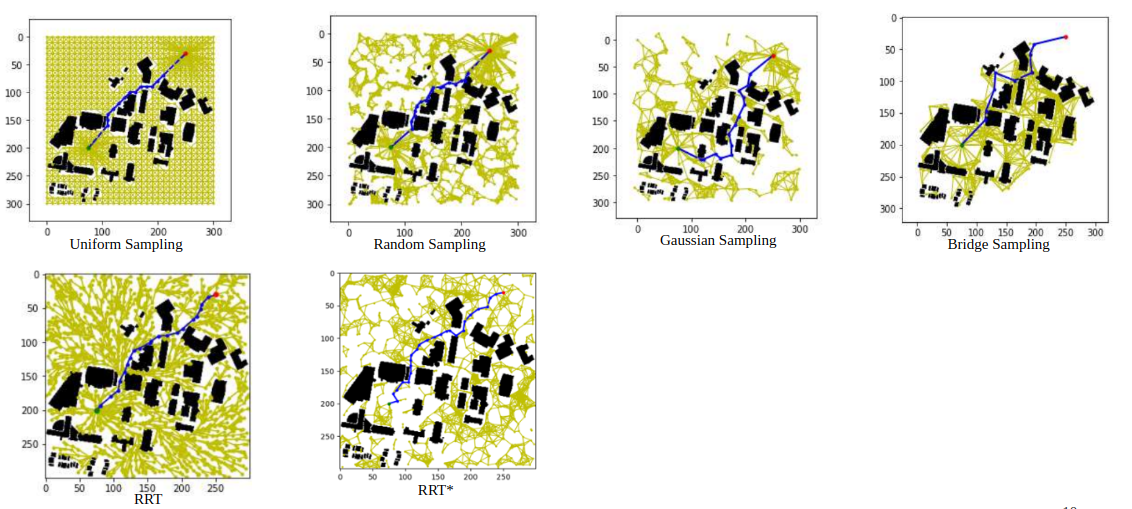
- Found feasible paths and compared distance metrics using discrete and sampling-based algorithms such as BFS, DFS, A*, Dijkstra's, PRM, RRT and RRT*.
View on GitHub
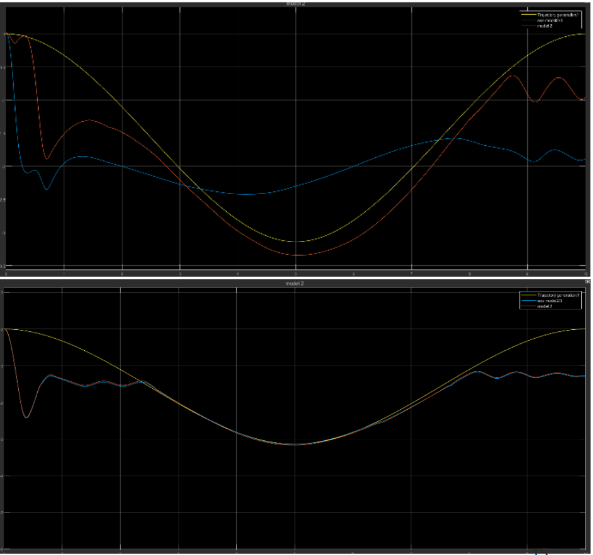
- Designed and fabricated 2 connected 1 Degree of Freedom robot using various spring mechanisms.
- Optimized the design parameters for the system on MATLAB Simulink and provided the required torque using an Admittance Sliding controller to the exo-skeleton system.
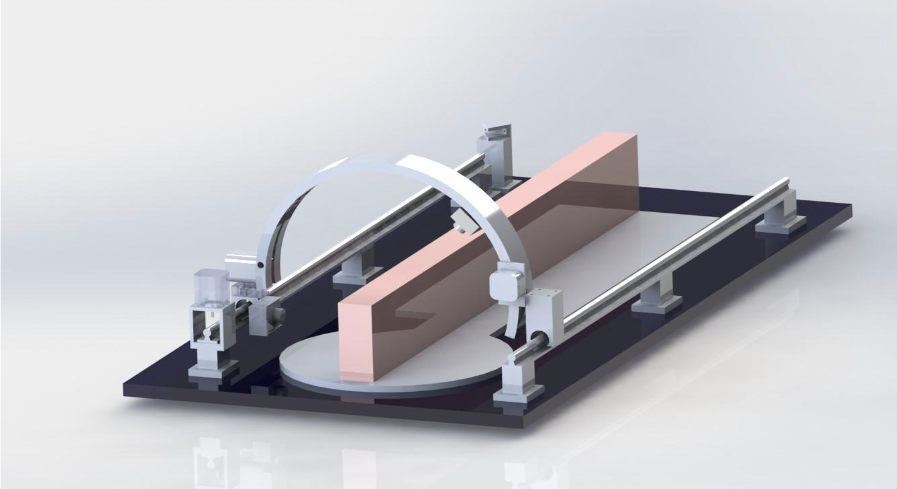
- Designed using Solidworks and built a 3-DOF system with 2 cameras to track a tube inserted into a human body.
- Controlled the motors using Arduino to position the camera along with the movement of the tube.

- Worked in the chassis subsystem on Hybrid-electric and combustion prototype. Promoted to chassis module head and led team of 5 people.
- Designed using Solidworks and fabricated fixture assembly for series-hybrid electric prototype.
- Developed a compact battery box design using Solidworks for stacking Lithium-ion batteries.
Education
Honors & Awards
Skills & Expertise
Programming & OS
Python, C++, MATLAB, ROS (Noetic), ROS2, Ubuntu
Development Tools
PyTorch, TensorFlow, Keras, Scikit-learn, OpenCV, Open3D, Labelme, Hugging Face, CUDA, Ultralytics, OpenGL, Gazebo, Rviz, Solidworks, AutoCAD, Simulink
Edge & Deployment
OnLogic, Advantech IPC, TensorRT, Git, ONNX, Docker
Machine Vision Tools
Cognex Insight, Cognex VisionPro Deep Learning, Keyence, ifm, Fanuc iRVision, Matrox DA, ZAVS, Aurora Focus
Relevant Coursework
Machine Learning, Deep Learning, Computer Vision, Sensor Fusion, Motion Planning, Robot Dynamics & Controls, Design of Machine Elements, Kinematic and Dynamics of Machines